Research
Reinforcement & Imitation Learning
|
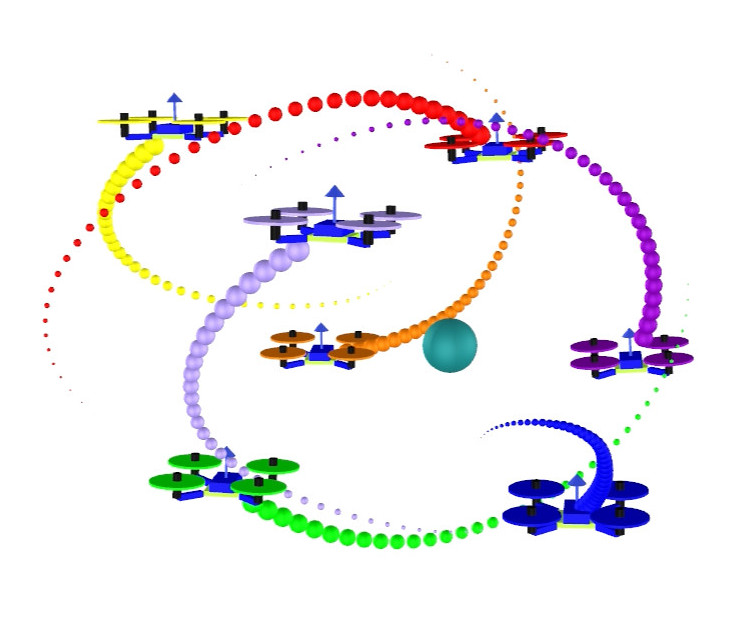
Decentralized Control of Quadrotor Swarms with End-to-end Deep Reinforcement Learning
International Conference on Robot Learning (CORL), 2021 S. Batra, Z. Huang, A. Petrenko, T. Kumar, A. Molchanov, G. Sukhatme |
|---|
|
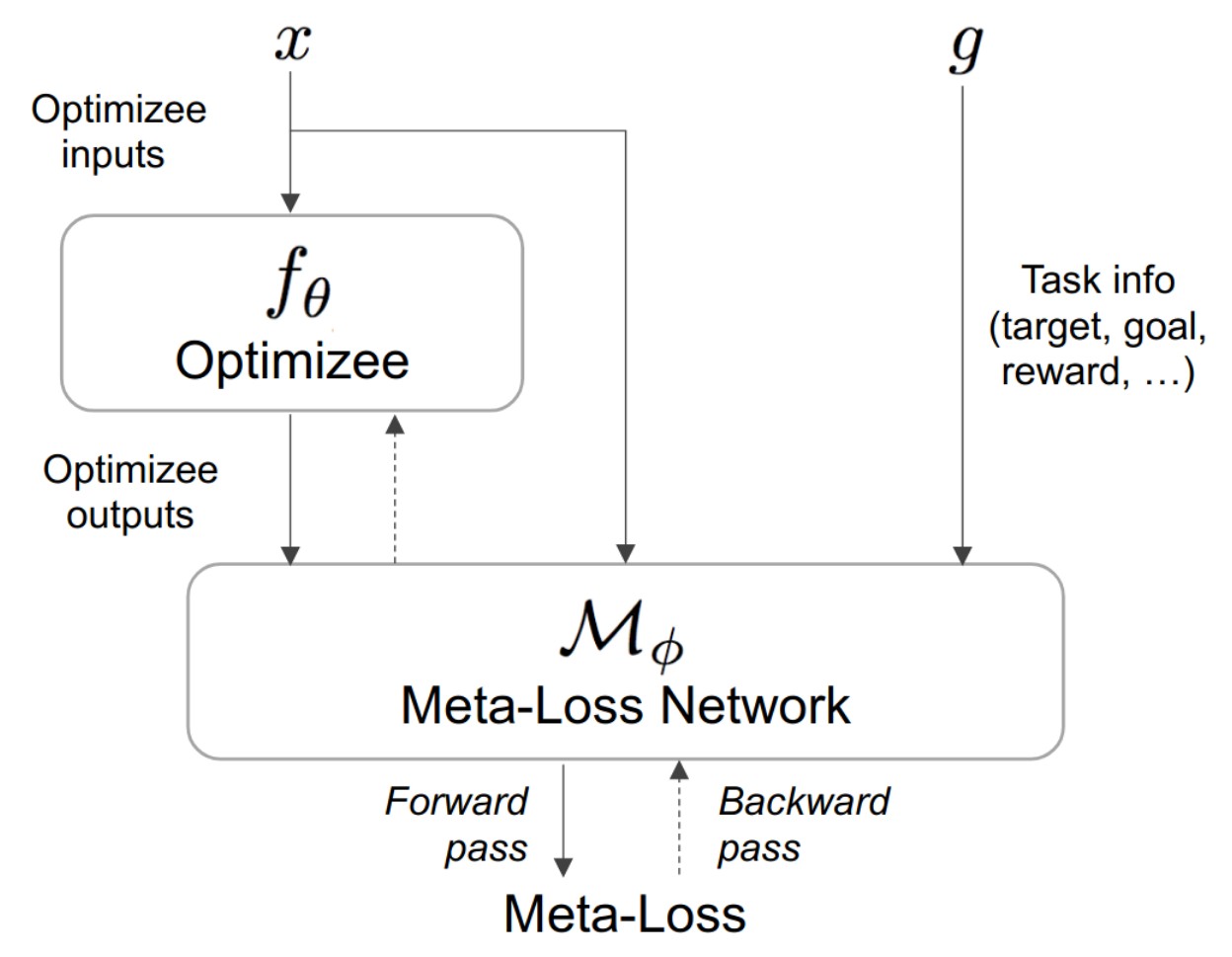
Meta-Learning via Learned Loss
International Conference on Pattern Recognition (ICPR), 2020 S. Bechtle, A. Molchanov, Y. Chebotar, E. Grefenstette, L. Righetti, G. Sukhatme, F. Meier |
|---|

|
Sim-to-(Multi)-Real: Transfer of Low-Level Robust Control Policies to Multiple Quadrotors
International Conference on Intelligent Robots and Systems (IROS), 2019 A. Molchanov, T. Chen, W. Hönig, J. Preiss, N. Ayanian, G. Sukhatme |
|---|
|
Region Growing Curriculum Generation for Reinforcement Learning
2018 A. Molchanov, K. Hausman, S. Birchfield, G. Sukhatme |
|---|
|
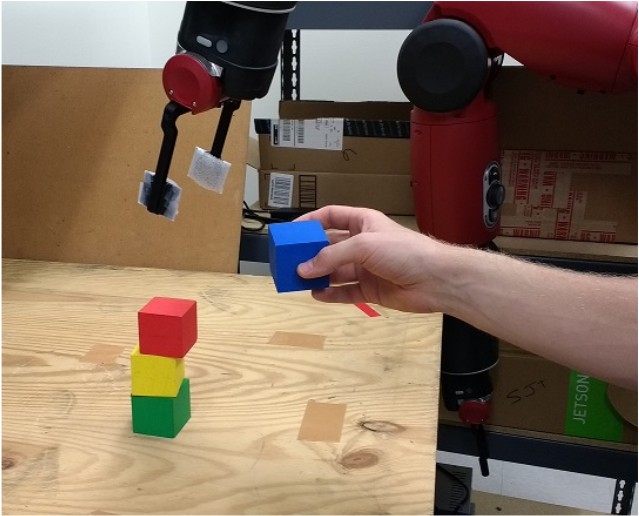
Synthetically Trained Neural Networks for Learning Human-Readable Plans from Real-World Demonstrations International Conference on Robotics and Automation (ICRA), 2018 J. Tremblay, T. To, A. Molchanov, S. Tyree, J. Kautz, S. Birchfield |
|---|
Perception for Manipulation
|
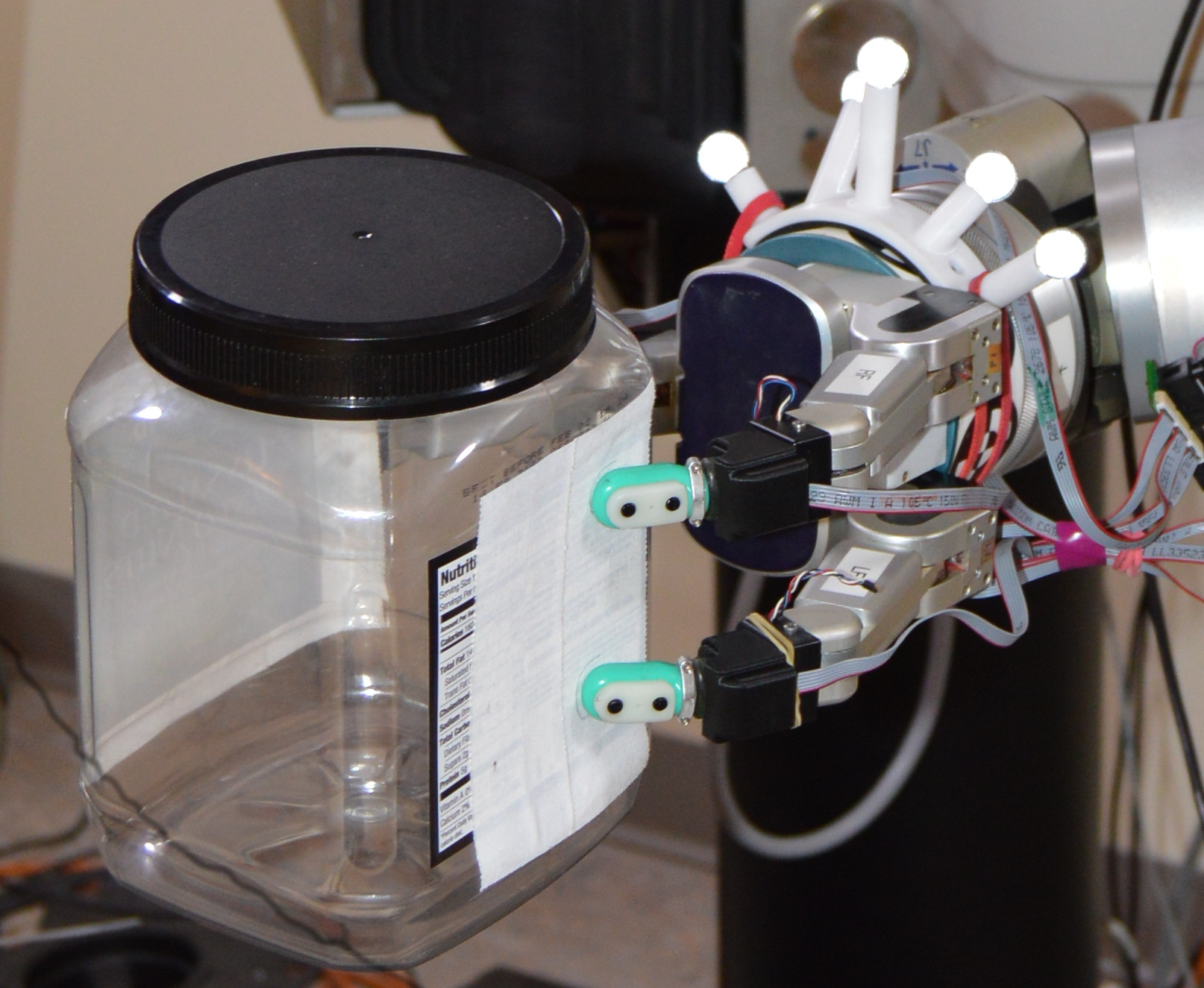
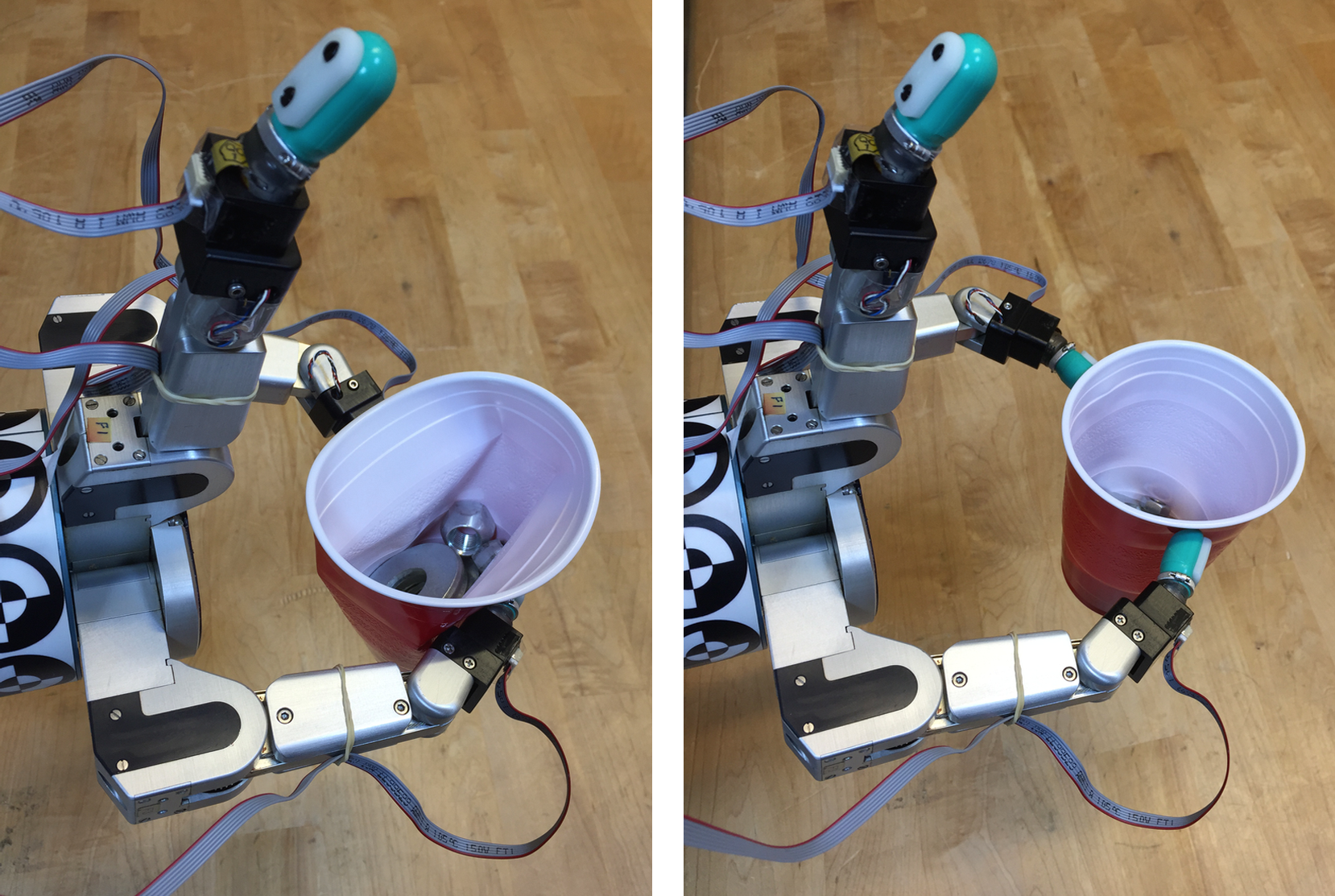
Contact Localization on Grasped Objects using Tactile Sensing
International Conference on Intelligent Robots and Systems (IROS), 2016 A. Molchanov, O. Kroemer , Z. Su, G. S. Sukhatme. |
|---|
|
Force Estimation and Slip Detection for Grip Control using BioTac International Conference on Humanoid Robotics (Humanoids), 2015 Z. Su, K. Hausman, Y. Chebotar, A. Molchanov, G. Loeb, G. Sukhatme, S. Schaal |
|---|
Multi-Robot Systems Control
|
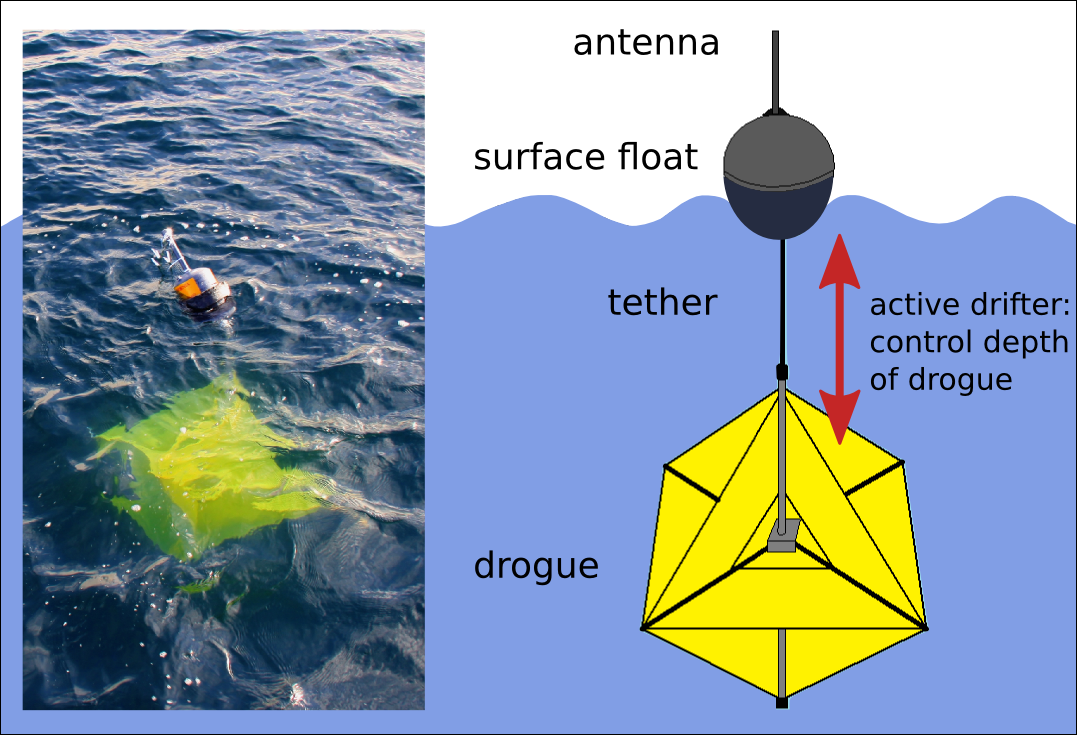
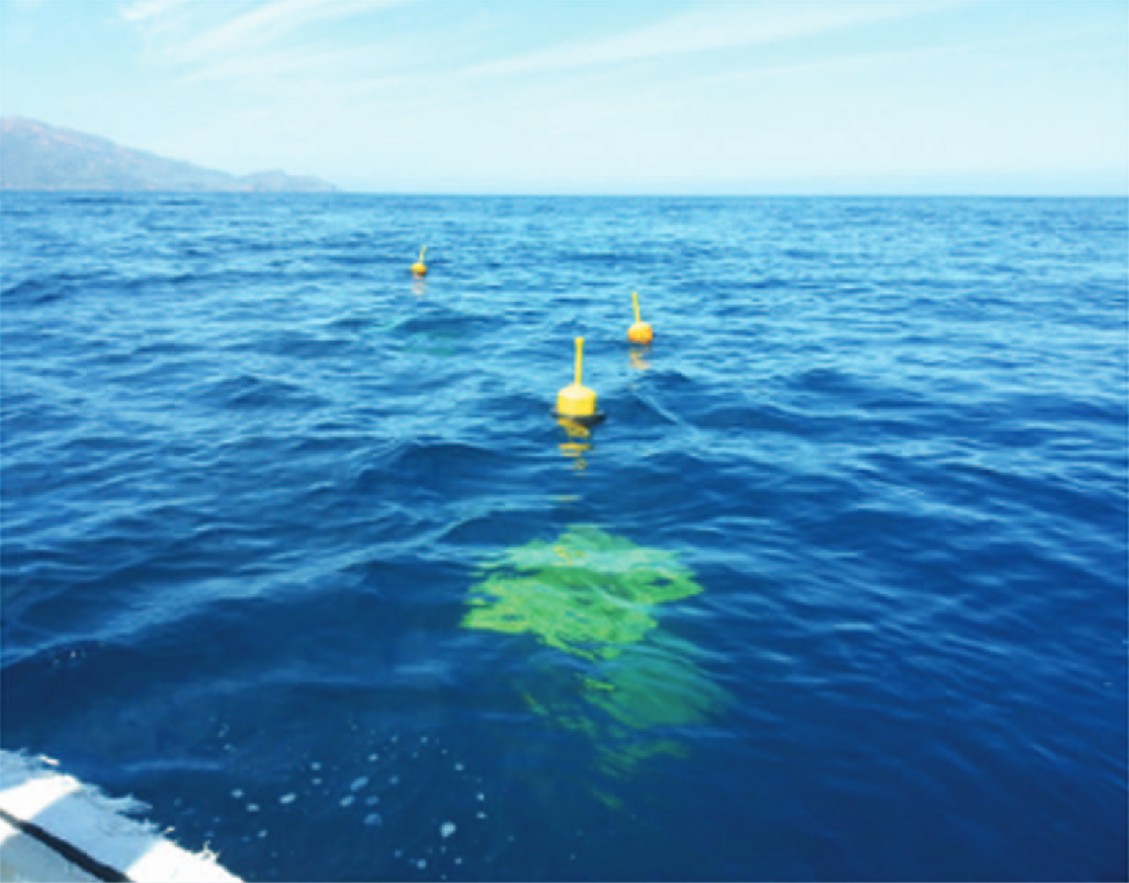
Active Drifters: Towards a Practical Multi-Robot System for Ocean Monitoring
International Conference on Robotics and Automation (ICRA), 2015 A. Molchanov, A. Breitenmoser, G. Sukhatme |
|---|
|
Circling the Seas: Design of Lagrangian Drifters for Ocean Monitoring
IEEE Robotics & Automation Magazine (RAM), 2016 S. Subbaraya, A. Breitenmoser, A. Molchanov, Jorg Muller, Carl Oberg, D. Caron, G. Sukhatme |
|---|
Workshop PublicationsMeta Learning via Learned LossICML Workshop on Multi-Task and Lifelong Reinforcement Learning, 2019 S. Bechtle, A. Molchanov, Y. Chebotar, E. Grefenstette, L. Righetti, G. Sukhatme, F. Meier. bibtex pdf Sim-to-(Multi)-Real: Transfer of Low-Level Robust Control Policies to Multiple Quadrotors Southern California Robotics Symposium, 2019 A. Molchanov, T. Chen, W. Honig, J. A. Preiss, N. Ayanian and G. S. Sukhatme. website bibtex pdf Model-free Contact Localization for Manipulated Objects using Biomimetic Tactile Sensors Humanoids Workshop on Tactile Sensing for Manipulation, 2016 A. Molchanov, O. Kroemer , Z. Su, G. S. Sukhatme. website bibtex pdf BiGS: BioTac Grasp Stability Dataset ICRA Workshop on Grasping and Manipulation Datasets, 2016 Y. Chebotar, K. Hausman, Z. Su, A. Molchanov, O. Kroemer, G. Sukhatme, S. Schaal website bibtex pdf Slip Classification using Tangential and Torsional Skin Distortions on BioTac BMVA Workshop on Visual, Tactile and Force Sensing for Robot Manipulation, 2015 Z. Su, K. Hausman, Y. Chebotar, A. Molchanov, G. Loeb, G. Sukhatme, S. Schaal bibtex pdf Slip Detection and Classification for Grip Control using Multiple Sensory Modalities on BioTac IROS Workshop on Multimodal Sensor-Based Robot Control for HRI and Soft Manipulation, 2015 Z. Su, K. Hausman, Y. Chebotar, A. Molchanov, G. Loeb, G. Sukhatme, S. Schaal bibtex pdf Active drifters: Sailing with the Ocean Currents RSS Workshop on Autonomous Control, Adaptation, and Learning for Underwater Vehicles, 2014 A. Molchanov, A. Breitenmoser, G. S. Sukhatme bibtex pdf |
|---|